Review of Course Computer Vision Lecture 14:Segmentation and Clustering
为期末考试复习做个准备。
Lecture 14: Segmentation and Clustering
语义分割要做的任务就是将图像分割成若干个目标。
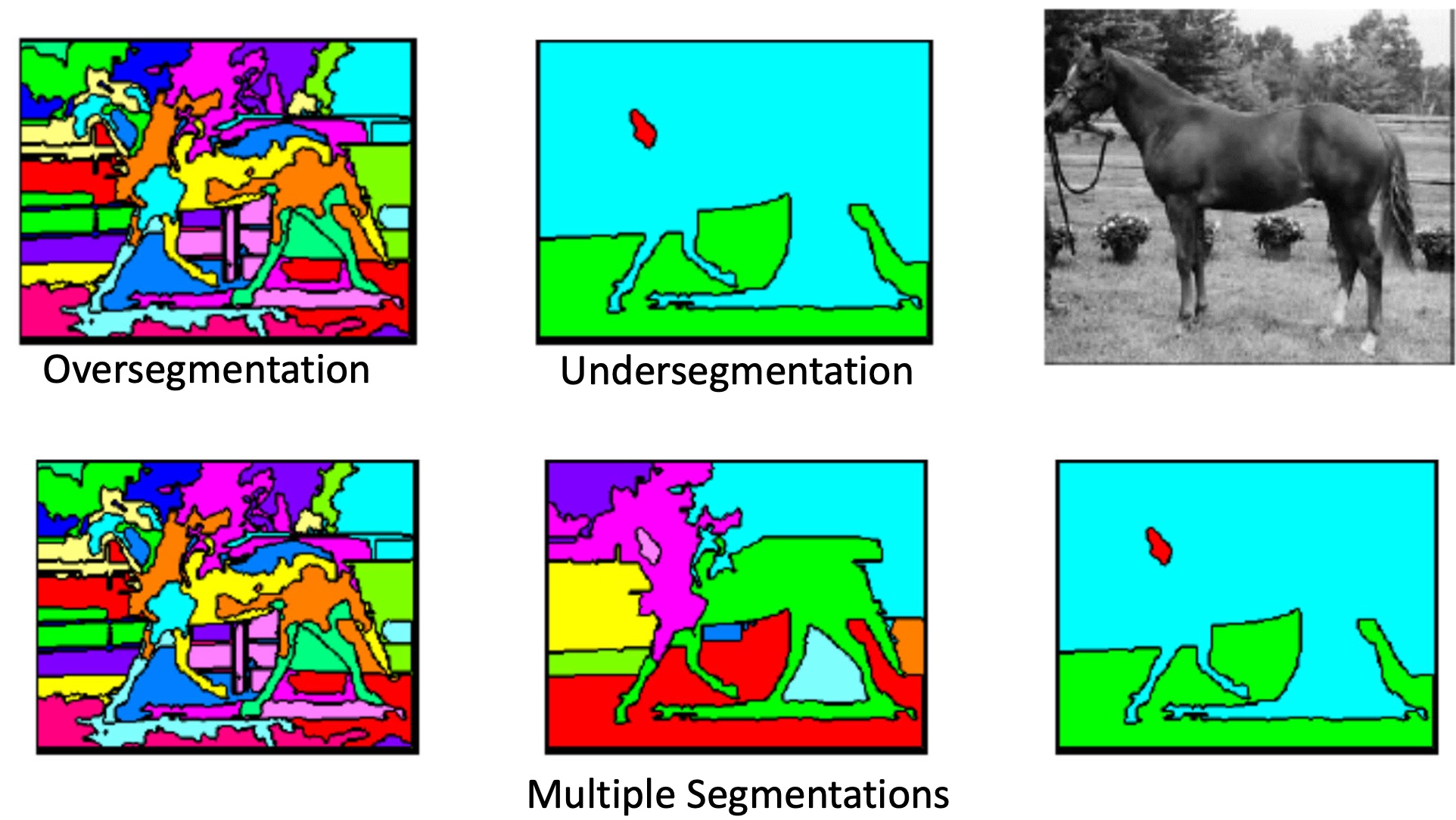
语义分割可以用聚类解决。即若对每个像素点用一些向量描述后,只需要在高维空间聚类,就可以将图像分割一个个部分,就完成了语义分割的任务。
聚类算法:
- Agglomerative clustering (层次聚类):每次选择两个”最近”的类合并。
- K-means:迭代,每次以类的中心来吸引更近点。
- Mean-shift clustering:基于密度的聚类。
聚类的思路也分两种:
- Bottom up clustering:一些 tokens 会被聚在一起是因为它们几乎一致。
- Top down clustering:一些 tokens 会被聚在一起是因为它们处于同一个目标中。
语义分割有如下几个基本的原则:
- Proximity:物体越接近,那么它们更容易被感知为同一组的。
- Similarity:若物体具有相似特征,那么它们更容易被感知为同一组的。
- Common Fate (共方向):若物体向共同方向运动,那么它们更容易被感知为同一组的。
- Symmetry (对称):我们倾向于把不对称,不完全,复杂的图形感知成对称、完全、简单的图形。
- Continuity:我们倾向于感知连续,而不是零散。也就是我们会把一些看起来零碎的东西看做是连续的。
- Closure (封闭):哪怕物体不完整(不存在),我们也能根据认知脑补出缺失的部分。
Agglomerative clustering
如何评判两个向量是否相似?一个想法是使用 $L_2$ (欧几里得距离);另一个想法是利用 Cosine 相似性。也即
$$
\mathrm{dist}(\mathbf{x},\mathbf{x’})=\sqrt{\sum (x_i-x’_i)^2}\\
\mathrm{sim}(\mathbf{x},\mathbf{x’})=\cos\theta=\frac{\mathbf{x}^T\mathbf{x’}}{\Vert \mathbf{x}\Vert\Vert\mathbf{x’}\Vert}=\frac{\mathbf{x}^T\mathbf{x’}}{\sqrt{\mathbf{x^T}\mathbf{x}}\sqrt{\mathbf{x’^T}\mathbf{x’}}}.
$$
聚类算法的几大原则:
- Scalability,在时间和空间上有可扩展性。
- 可以处理不同类别的数据。
- 容易确认输入的参数。
- Interpretability and usability,可解释和可用,即可以根据用户需求指定。
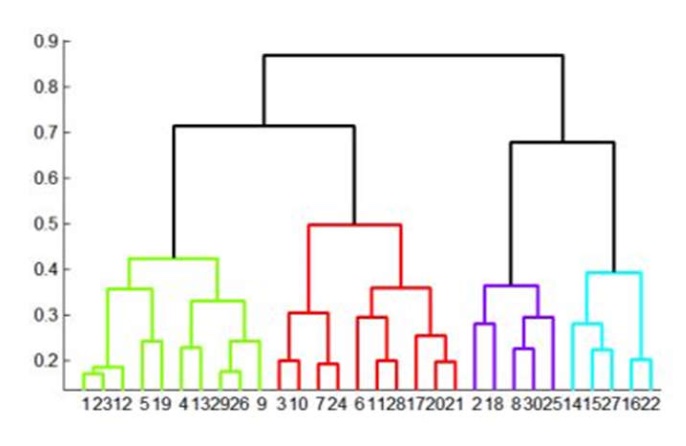
层次聚类的想法比较简单。初始时把每个点看成一个类,然后每次选择两个”最近”的类合并,不断更新,就能获得一棵记录了合并过程的树。根据我们的需求来选择树上的某一层即可。
于是我们只需要考虑如何定义两个类的距离,方式比较多,下面介绍四种。
- Average distance between points: $d(C_i,C_j)=\frac{\sum_{\mathbf{x}\in C_i}\sum_{\mathbf{y\in C_j}}d(\mathbf{x},\mathbf{x’})}{\lvert C_i\rvert\lvert C_j\rvert}$,又被称为 Average linkage。
- maximum distance: $d(C_i,C_j)=\max_{\mathbf{x}\in C_i, \mathbf{x’}\in C_j} d(\mathbf{x},\mathbf{x’})$,又被称为 Complete linkage,它会生成比较胖的类。
- minimum distance: $d(C_i,C_j)=\min_{\mathbf{x}\in C_i, \mathbf{x’}\in C_j} d(\mathbf{x},\mathbf{x’})$,又被称为 Single linkage,它会生成比较长条的类,同时可以通过这个类之间的距离来设定是否停止聚类。
- Distance between means or medoids: 距离定义为两个类的均值点之间的距离或者中心点之间的距离。
层次聚类的优势:
- 应用广泛,实行简单。
- 类会有自适应的形状。
- 给出了类的层次 (聚类过程树)。
- 在一开始不需要限定类的数量。
劣势:
- 可能拥有不平衡的类。
- 在最后仍需要确定类的数量或者距离阈值来决定类。
- 时间复杂度比较糟糕,暴力实现是 $\mathcal O(n^3)$,不过通过一些数据结构优化后可以达到 $\mathcal O(n^2)$。
- 会陷入局部最优解。
K-means clustering
对于一些中心情况较为明确的图而言,K-means 往往效果会更好。

它主要就是根据最小化 $\mathrm{SSD}=\sum_{i}\sum_{\mathbf{x}\in C_i}\Vert \mathbf{x}-\mathbf{c}_i\Vert^2$ 来完成聚类,更形式化,我们有
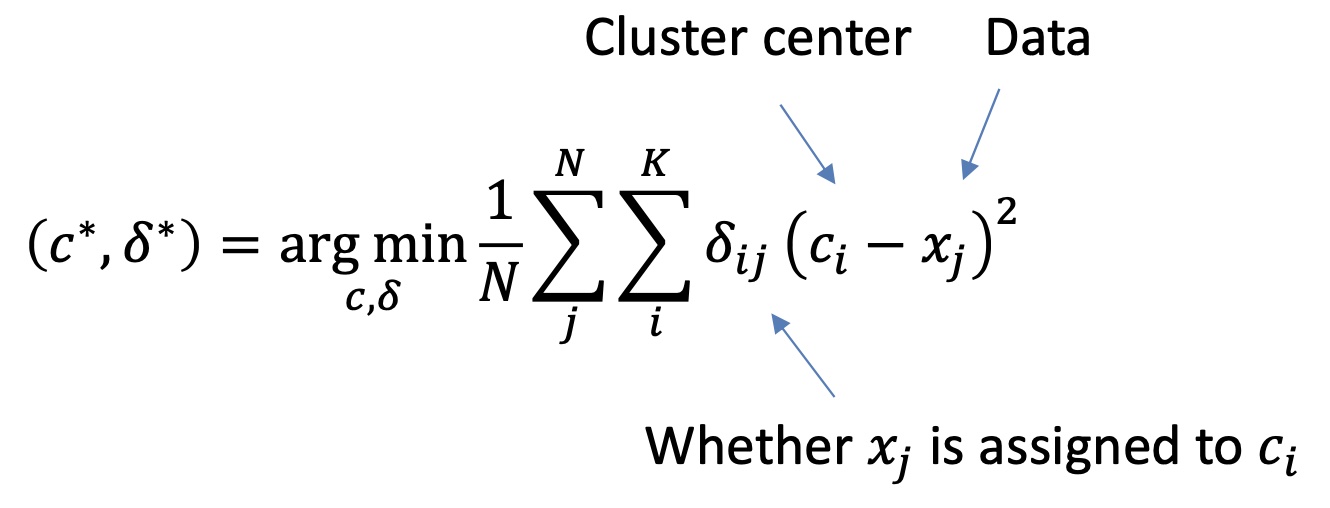
问题就在于,$c$ 被 $\delta$ 确定,这该怎么办呢?对于这种内部循环镶嵌的结构,我们一般使用迭代法。
由于 K-means 较为简单,这里不再做过多赘述。

真实情况中,只要 $c^t$ 变化不动就认为其收敛了。
毫无疑问,K-means 容易收敛到一个局部最优解。同时由于它是到中心的距离来限制,很多时候是更加希望类的形状为球形。$K$ 也需要自己设置,不过很多时候是枚举所有 $K$ 值找最优解。
而对于这些特征的向量选取,有多种方式,比如颜色向量,或者纹理向量 (BoW 类似),或者像素值加位置向量,第三种综合考量了 similarity 和 proximity。又或者用颜色加位置,这样是考量了更多的 spatial coherence。
K-Means 的优势:
- 找到类的中心最小化了条件方差 (每个类能很好地被表达)。
- 简单,快速,方便实行。
劣势:
- $K$ 要自己选择。
- 对局外点敏感 (因为每次是考虑所有点)。
- 容易陷入局部最优解。
- 要求类的形状为球形,不再自适应。
- 每个类的参数一致 (距离函数不是自适应的)。
Mean-shift clustering
Mean-shift 聚类的主要思路是密度聚类,对于每个点我们会用一个圆形窗口来估计密度最大的方向,不断往那个方向移动。
核密度函数为 $\hat{f_h}(x)=\frac{1}{nh}\sum_{i=1}^n K(\frac{x-x_i}{h})$,其中 $K$ 为核函数,一般取高斯核函数,即 $K(x)=\frac{1}{\sqrt{2\pi}\sigma^d}e^{-\frac{\Vert x\Vert^2}{2\sigma^2}}$,其中 $h$ 为圆形 (球体) 窗口的半径,$n$ 为窗口内检测出的点数,$d$ 是维度,一般 $\sigma$ 取 $1$。
根据核密度函数,我们想要往密度最大的方向移动,就是将核密度函数求梯度。不妨设 $K(x)=k(\Vert x\Vert^2), g(x)=-k’(x)$, 于是得到
$$
\nabla \hat{f_h}(x)=\frac{2}{h^2}[\frac{\sum_{i=1}^n g(\Vert \frac{x_i-x}{h}\Vert^2)}{nh}][\frac{\sum_{i=1}^n (x_i-x)g(\Vert \frac{x_i-x}{h}\Vert^2)}{\sum_{i=1}^n g(\Vert \frac{x_i-x}{h}\Vert^2)}].
$$
前面的部分都是常量,后面是均值向量,所以我们会沿着后面那部分移动中心点,即偏移向量是
$$
m(x)=\frac{\sum_{i=1}^n (x_i-x)g(\Vert \frac{x_i-x}{h}\Vert^2)}{\sum_{i=1}^n g(\Vert \frac{x_i-x}{h}\Vert^2)}.
$$
偏移后的位置为 $m(x)+x=\frac{\sum_{i=1}^n x_ig(\Vert \frac{x_i-x}{h}\Vert^2)}{\sum_{i=1}^n g(\Vert \frac{x_i-x}{h}\Vert^2)}$。
具体步骤:
- 初始化圆球窗口 $W$,大小为 $h$。
- 对于每一个点: (1) 以这个点为中心用窗口检测 (2) 根据 $m(x)$ 获得新的中心点 (3) 以新的中心点检测 (4) 重复 (2)(3) 直到收敛。
- 对于抵达相同中心点的点归为同一类。
Mean-shift clustering 优势:
- 通用且应用独立。
- 聚类对类的形状毫无限制,可以检测出任何形状。
- 只需要一个参数 $h$,且 $h$ 有物理意义。
- 能找到不同的类。
- 对局外点有鲁棒性。
- 适合 Oversegmentation, Multiple segmentations, Tracking, clustering, filtering applications。
劣势:
- 结果依赖于 $h$。
- $h$ 的选择并不容易。
- 计算时的时间复杂度较高。
- 高维不太适合。
Graph-based segmentation
图聚类的想法是,如果考虑任意两个点的边权是距离相关的某个值的话,求最小生成森林可以被理解为聚类算法等。
我们考虑合并两个连通块 (类) 的要求是什么。
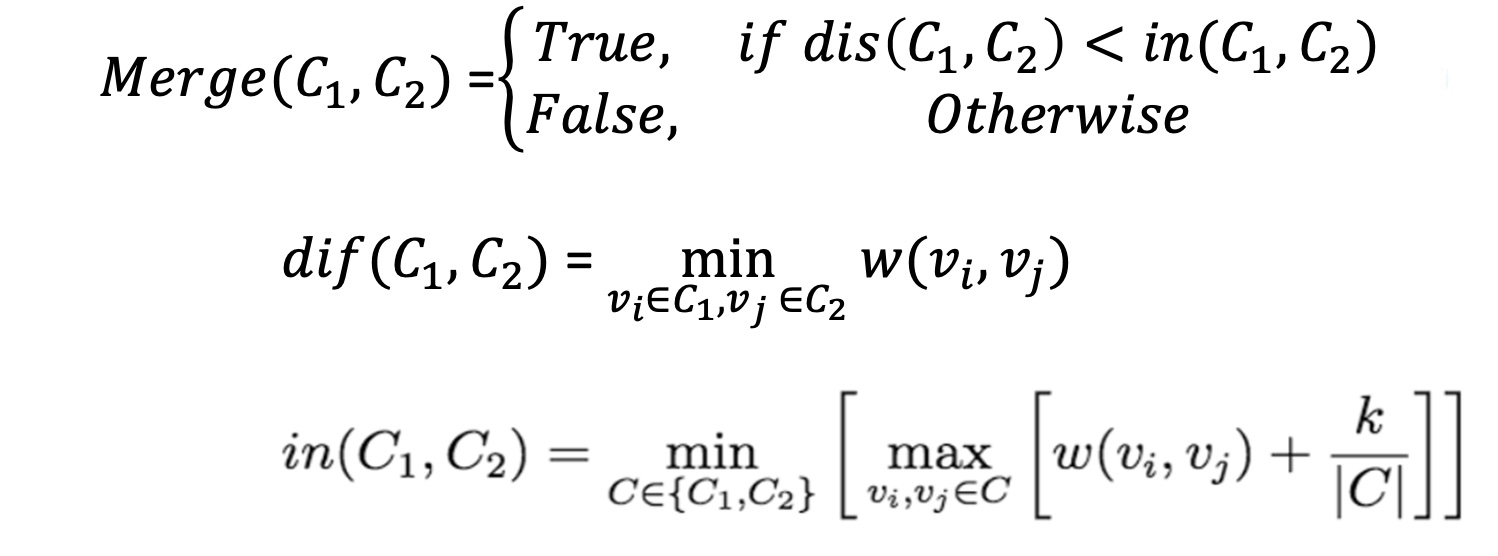
当 $\mathrm{Merge}(C_1,C_2)$ 是 True 的时候就代表可以合并 $C_1, C_2$。图中的 $\mathrm{dif}$ 是打错了,实际应该为 $\mathrm{dis}$。$\mathrm{dis}$ 求的是两个连通块 (类) 之间的最短距离,而 $\mathrm{in}$ 实际上表示的是两个连通块自己内部最大的边权加上某一个阈值,其中 $k$ 为某一预先设置的参数。
我们能理解这个合并。如果自己这一类内部的合并难度就已经大于与其他类合并的话,那肯定会想着与其他类合并。在 $k$ 这一阈值的限制下,给予了更多合并的机会。$k$ 小的时候,会要求类较小;$k$ 大的时候,会要求类较大。

对于图的构建,一种经典的思路是,每个像素点认为是 $(r,g,b,x,y)$ 五维向量,与和它邻域内的点连边,边权使用 $L_2$ 即欧几里得距离来描述,一般连边选择邻域内边权最小的十个点。