Review of Course Computer Vision Lecture 2:Filter
为期末考试复习做个准备。
Lecture 2: Filter
图像种类
- 二进制 (Binary)
- 灰度图 (Grayscale)
- 有色图 (Color)
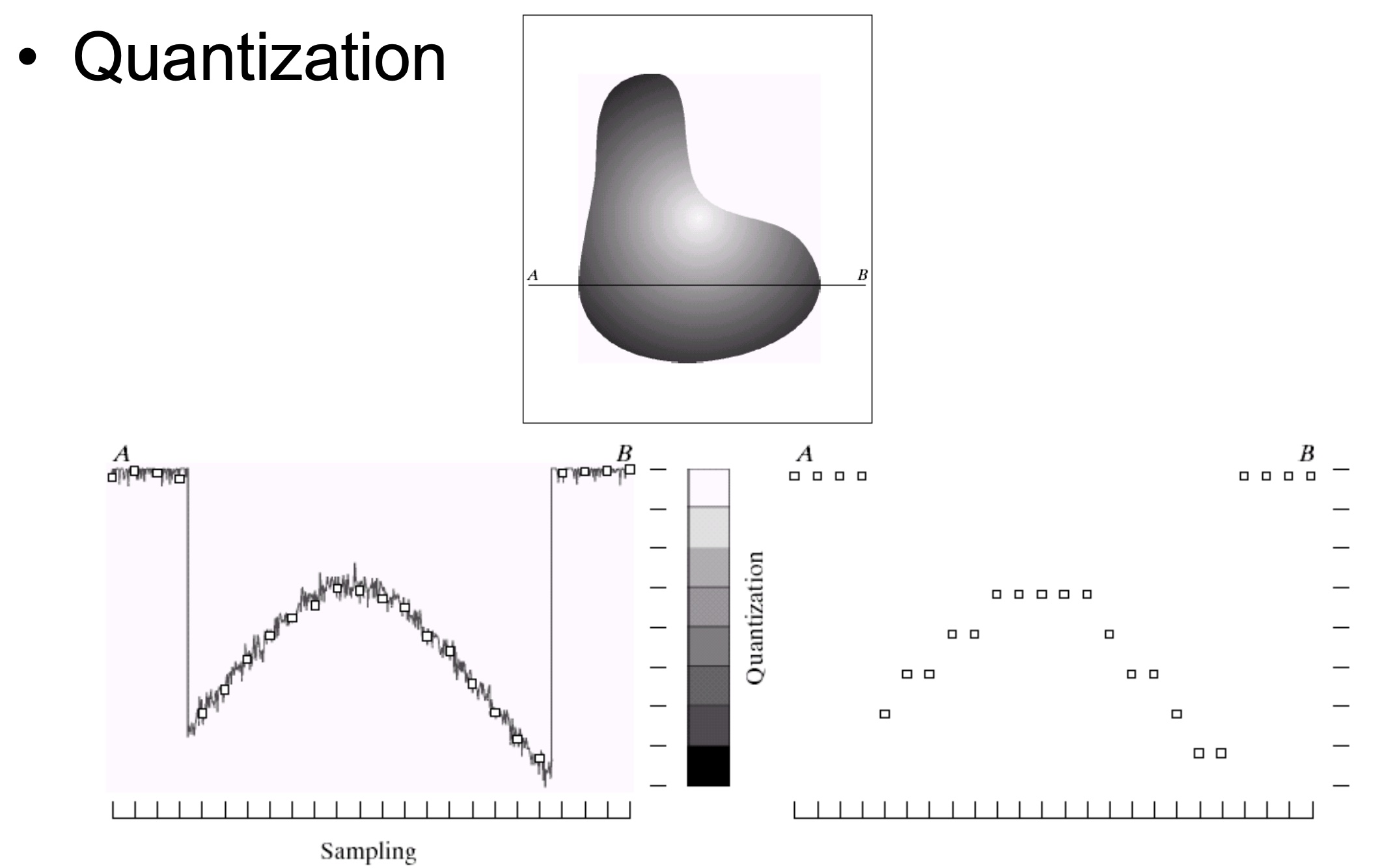
对原图像的采样构成了数字图像,存在误差。
分辨率 (Resolution) 是采样的参数,定义为 DPI (dots per inch) 或者像素密度。

采样之后,再对像素值进行量化 (Quantization)。
Transformations (图像变换)
图像变换的种类:Filtering, Warping, …
图像变换方式:单点变化 (Point operation, point processing), 邻域变化 (Neighborhood operation, filtering)
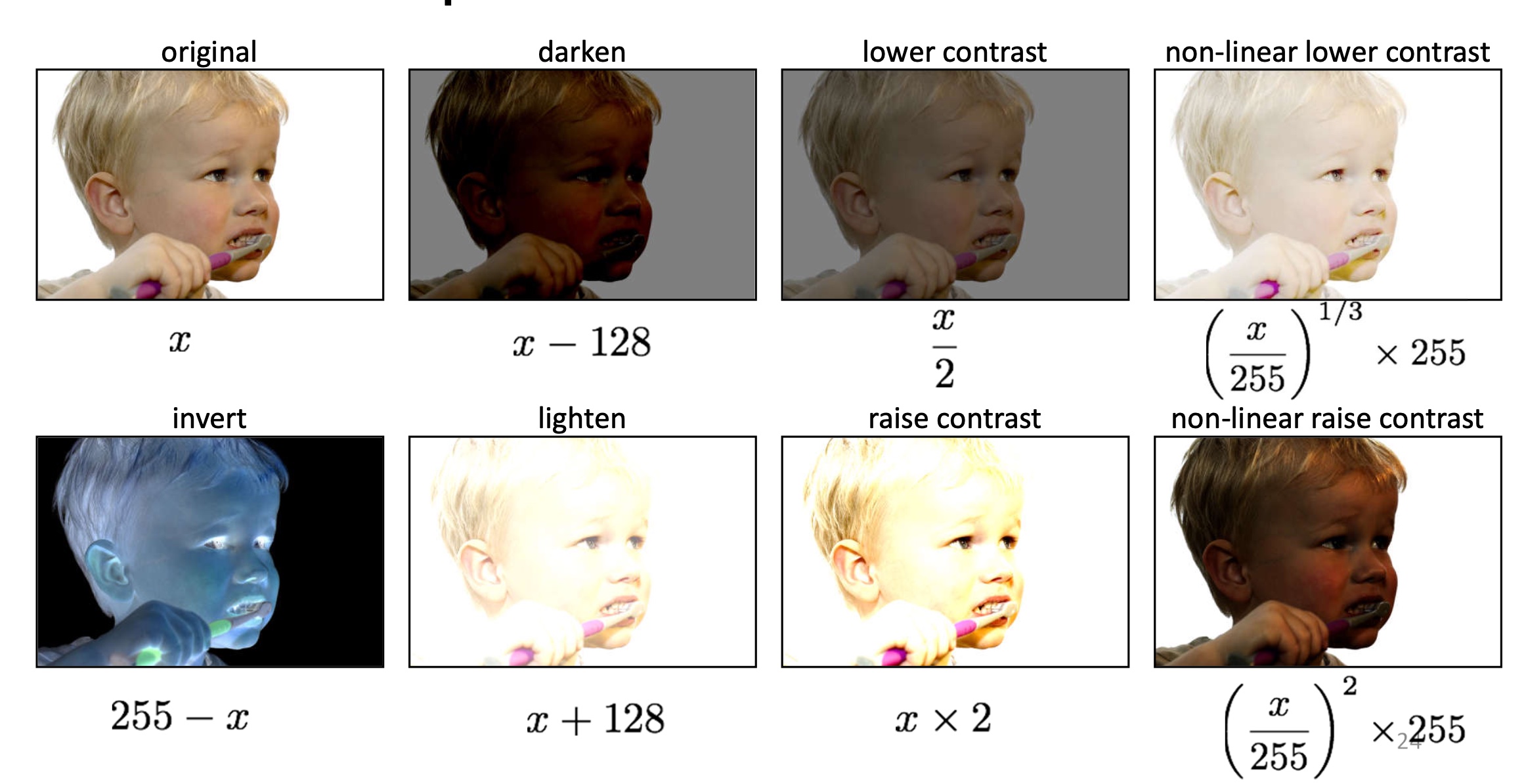
Point Processing
Filtering
Linear shift-invariant image filtering: 用二维核矩阵(如平均值矩阵等),对图像做点积操作(对应位置相乘),不断移动而获取新矩阵的每个位置的新像素,以此来整合邻域信息。
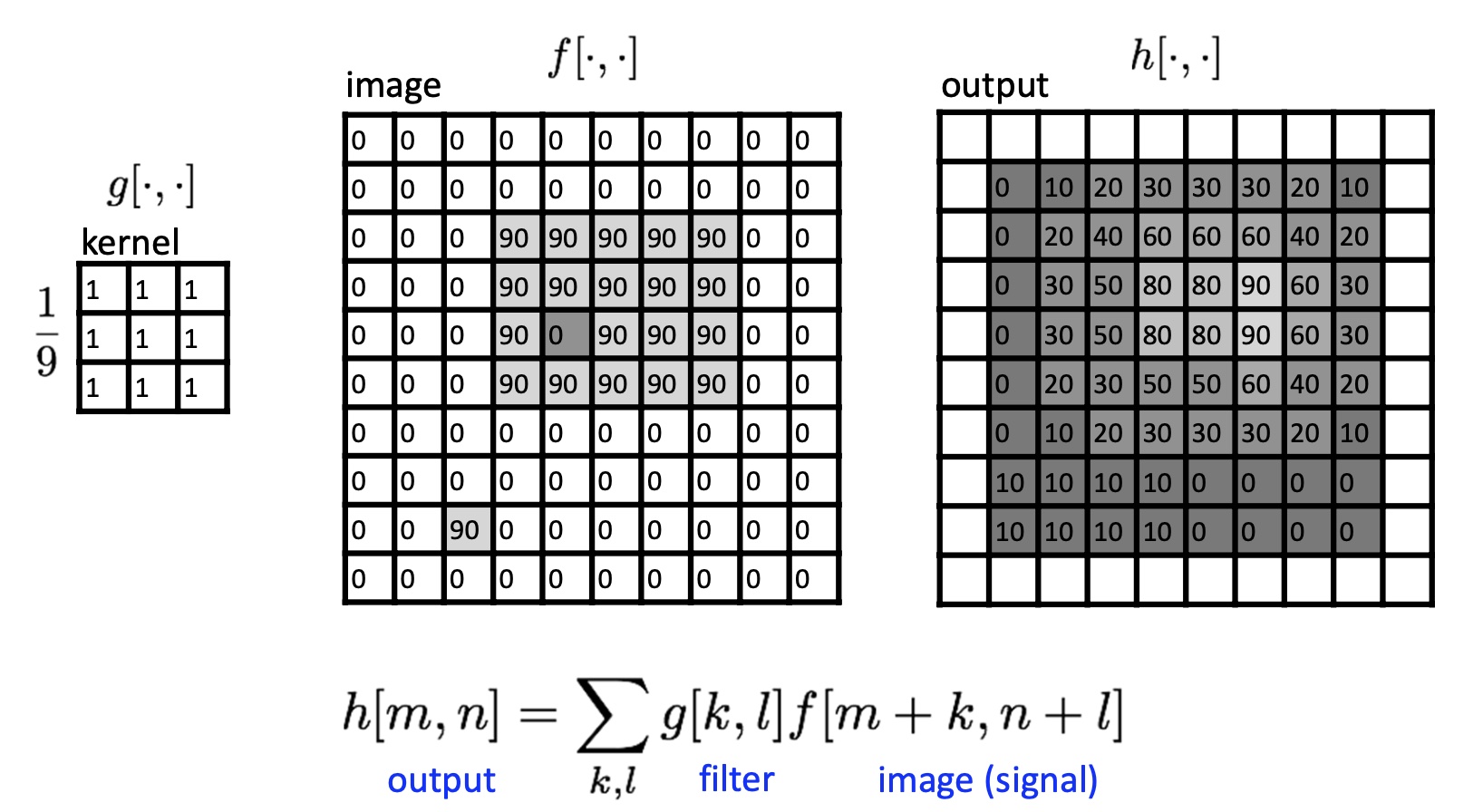
Convolution: 卷积即下标之和为要求的值,公式为
$$
(f\ast g)(x, y)=\sum_{i=-1}^{1}\sum_{j=-1}^1 f(i,j)I(x-i,y-j).
$$
其中,$f$ 为一个 $3\times 3$ 的卷积核,$I$ 是原图像。
可分离滤波器 (Separable filters): 指的是滤波器 $f$ 矩阵可被表示成向量的乘积 $vw^T$,意义在于优化卷积的时间复杂度,这是由于矩阵乘法和卷积具有结合律和分配律。公式表达为
$$
(f\ast g)(x, y)=\sum_{i=-1}^{1}\sum_{j=-1}^1 f(i,j)I(x-i,y-j)=\sum_{i=-1}^1\sum_{j=-1}^1 v_iw_jI(x-i,y-j)\\
=\sum_{i=-1}^1v_i\sum_{j=-1}^1 w_jI(x-i,y-j).
$$
此时考虑所有的 $x,y$,对 $I$ 固定的第一维,可以预处理出第二维的所有信息,再处理第一维,这样的复杂度是 $\mathcal O(NM^2)$,其中 $N\times N$ 是滤波器大小,$M\times M$ 是 $I$ 的大小。若不可分离,则需要 $\mathcal O(N^2M^2)$ 的复杂度。
高斯滤波器: $f(i,j)=\frac{1}{2\pi\sigma^2}e^{-\frac{i^2+j^2}{2\sigma^2}}$,是一个低通滤波器,离中心越远贡献越小,具有极好的性质。$\sigma$ 被称为尺度,是人为设定的参数,常常只使用 $2\sigma\sim 3\sigma$ 大小的高斯矩阵作为滤波器(因为其他位置数值过于接近 $0$,直接忽略)。
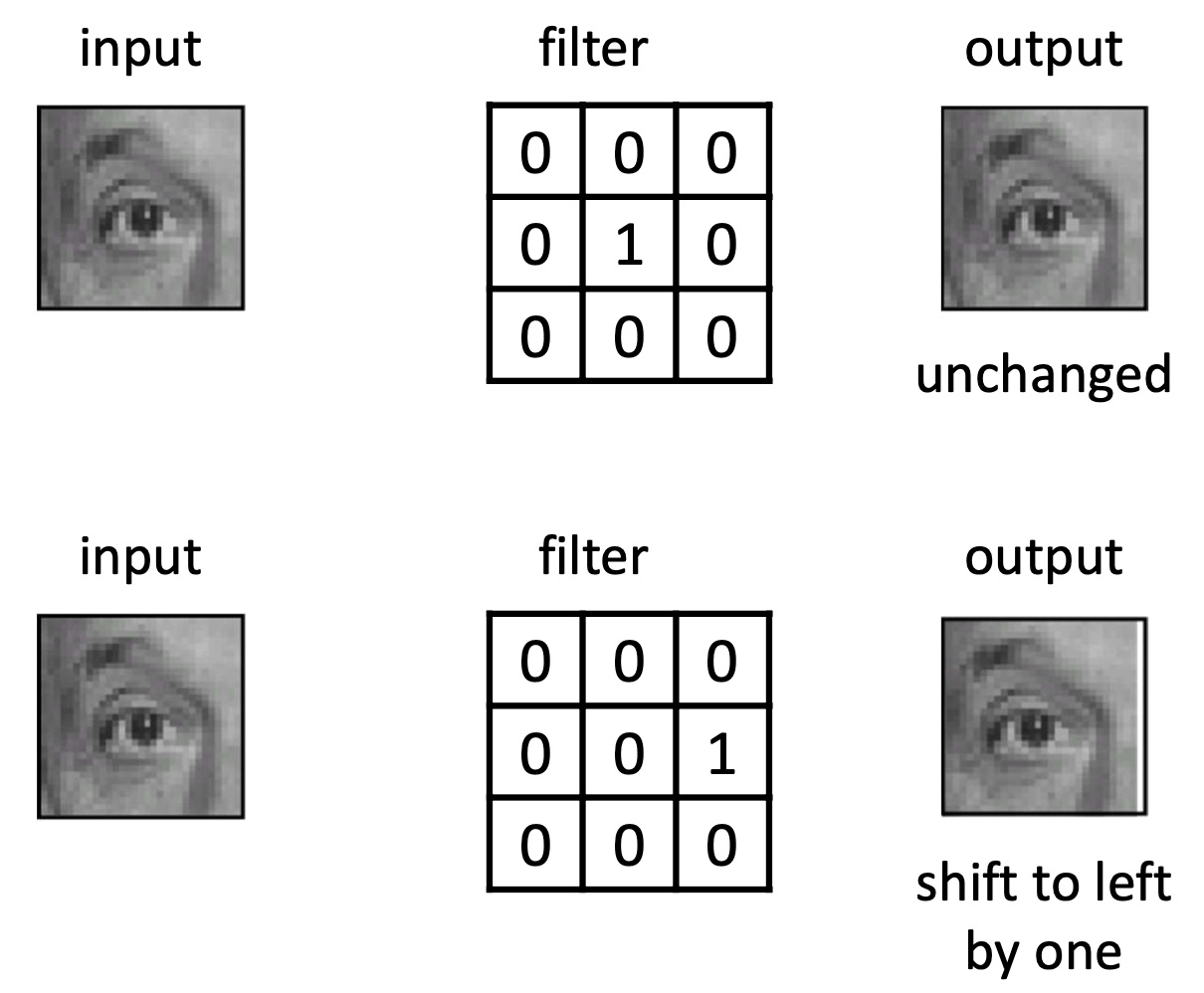
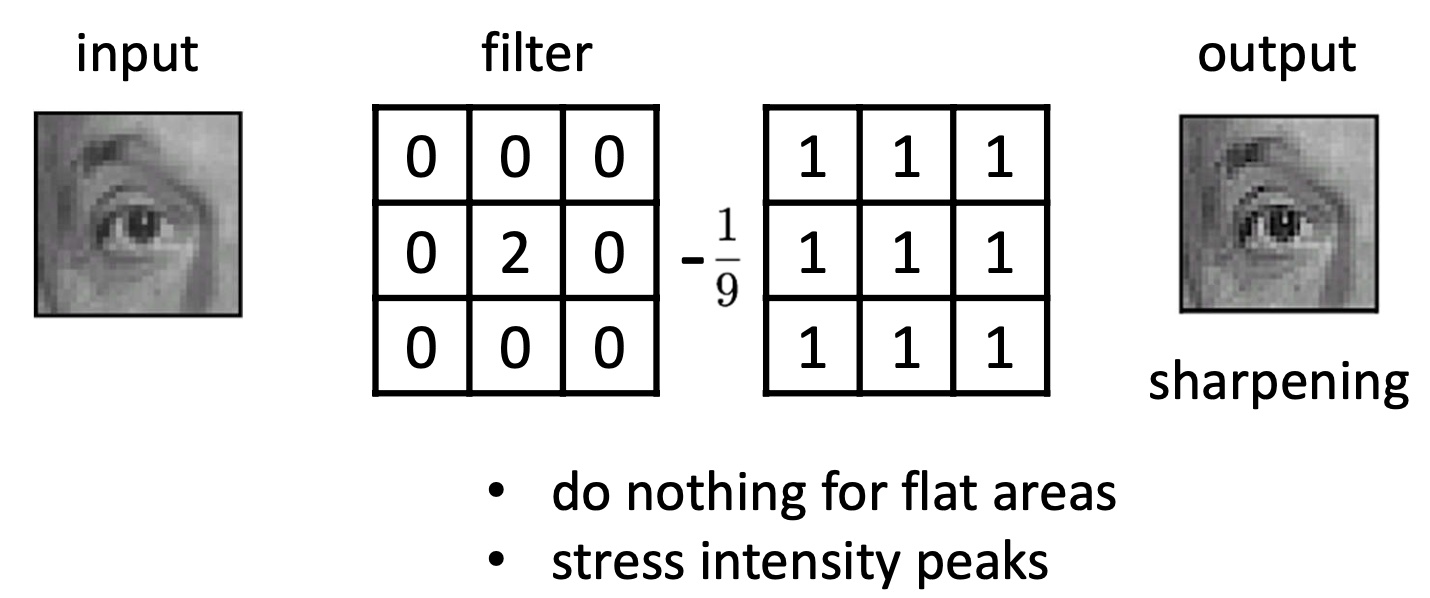
其他滤波器: 如位移滤波器,锐化滤波器等。